










QR Code

À propos de nous
Des produits
Contactez-nous

Téléphone

E-mail

Adresse
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine

1 、 Présentation du projet
Ce plan vise à personnaliser un système de plate-forme de pratique de l'éducation des robots pour répondre aux besoins d'enseignement d'un laboratoire universitaire en vision industrielle et en contrôle de la force. Le système sera développé autour du robot collaboratif Aubo-I5, de la caméra industrielle Hikvision, de la caméra 3D et du capteur de force à six axes à atteindre des fonctions telles que le contrôle du robot, l'inspection visuelle et l'assemblage de contrôle de la force, et fournit des logiciels informatiques supérieurs open source pour une extension fonctionnelle ultérieure.

2 、 Composition matérielle du système
Robot: Adoptant un robot collaboratif Aubo-I5, il a les caractéristiques d'une haute précision et d'une sécurité élevée, et convient aux scénarios d'enseignement.
Caméra: y compris la caméra industrielle Hikvision et la caméra 3D, utilisée pour obtenir des informations d'image sur les pièces, soutenant le traitement traditionnel d'image et la détection d'image en profondeur.
Capteur de force à six dimensions: Kunwei (KWR75) ou d'autres marques sont sélectionnés pour la surveillance en temps réel des informations d'interaction de force entre l'effecteur final du robot et la pièce.
3 、 Conception des logiciels informatiques supérieurs
Fonctions de base:
Contrôle des robots: implémentation de fonctions telles que la connexion, la déconnexion, le contrôle conjoint ou de la posture des robots.
Contrôle de la caméra: implémenter des fonctions telles que la connexion de la caméra, la déconnexion et l'acquisition d'images.
Affichage d'état: affichage en temps réel du joint du robot et état de la pose, paramètres d'état du capteur de force de six axes et images capturées par la caméra.
Caractéristiques exclusives:
Assemblage des trous d'arbre: Grâce au fonctionnement de l'ordinateur supérieur, combiné avec une technologie d'inspection visuelle et de contrôle de la force, la fonction d'assemblage automatique du trou d'arbre est obtenue.
Conception de l'interface: L'interface de l'ordinateur supérieur doit être concise, claire et facile à utiliser. L'interface doit inclure les boutons de fonction de base et une zone d'affichage d'état, ainsi que l'accès à la fonction d'assemblage du trou d'arbre.
4 、 Implémentation de la fonction
Vision machine:
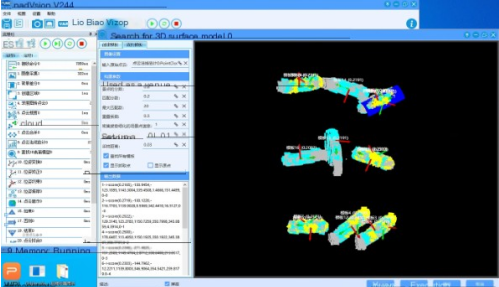
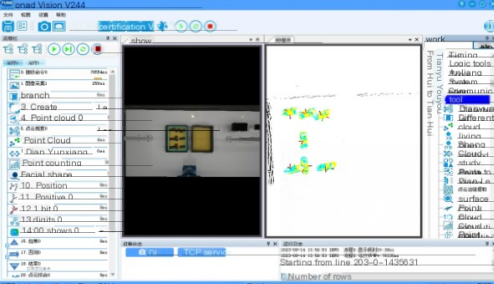
Détection d'image traditionnelle: l'utilisation de la correspondance du modèle, de l'ajustement du cercle, de l'ajustement des bords et d'autres méthodes pour localiser et reconnaître les pièces, soutenant la reconnaissance des codes à barres, des codes QR, des numéros de caractère, ainsi que le calcul de la zone de niveaux de gris et de la quantité de plaque.
Détection d'image de l'apprentissage en profondeur: reconnaissance automatique et localisation des pièces à travers des algorithmes d'apprentissage en profondeur. Bien que l'apprentissage en profondeur nécessite toujours l'annotation manuelle des images, nous nous efforcerons d'améliorer l'efficacité de la formation et la précision de la reconnaissance, réduisant progressivement la charge de travail d'annotation.
Ensemble de contrôle de puissance:
En combinant les données de capteurs de force six dimensions, réalisez le contrôle d'interaction de la force entre l'effecteur final du robot et la pièce de travail, et complétez un assemblage précis du trou d'arbre.
5 、 Risques du projet et mesures de réponse
Risque de coopération avec les capteurs de force de six axes: en raison du manque de coopération avec les capteurs de force de six axes, il peut y avoir certaines difficultés techniques et incertitudes. Nous organiserons une équipe technique professionnelle pour résoudre le problème et assurer l'intégration fluide et le fonctionnement stable des capteurs.
Risque de détection d'image en profondeur: La détection d'image en profondeur nécessite un certain niveau de précision et d'efficacité de reconnaissance, tout en répondant aux exigences d'une formation en un clic. Nous continuerons d'optimiser les algorithmes d'apprentissage en profondeur pour améliorer la précision et l'efficacité de reconnaissance, tout en explorant les moyens de mettre en œuvre une formation sur un clic.
6 、 Extension post-post et commutation de scène
Le logiciel informatique supérieur adopte la conception open source, qui facilite l'expansion fonctionnelle et la commutation de scène au besoin dans l'enseignement ultérieur. Par exemple, la scène d'assemblage des trous d'arbre peut être passée à des tâches telles que le maillage des engrenages fins ou la reconnaissance et la saisie d'autres pièces. En modifiant et en débogues des programmes open source, il est facile d'atteindre les fonctions de fonctionnement du robot et de détection visuelle dans différents scénarios.
Ce plan intègre des ressources matérielles telles que les robots, les caméras et les capteurs de force à six axes, combinés à la conception de logiciels d'ordinateur supérieure open source, pour fournir un environnement d'enseignement riche en fonctionnalités et facilement extensible pour la plate-forme de pratique de l'éducation des robots. Grâce à l'utilisation de plates-formes pratiques, les étudiants peuvent mieux comprendre les principes et les applications de la technologie de la vision machine et du contrôle des forces, et améliorer leurs capacités pratiques et innovantes.
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine
