











QR Code

À propos de nous
Des produits
Contactez-nous

Téléphone

E-mail

Adresse
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine

Aperçu du projet
Ce projet vise à concevoir un système de chargement automatique efficace et stable de camion-benne pour répondre aux besoins de charge des clients dans des conditions de production intérieure dans la région de Shanxi. Le système doit obtenir un fonctionnement et un contrôle sans pilote des véhicules d'ingénierie, remplissant uniquement les fonctions de manipulation et de charge automatique des points A et B pour répondre aux exigences de fonctionnement continu de la ligne de production.
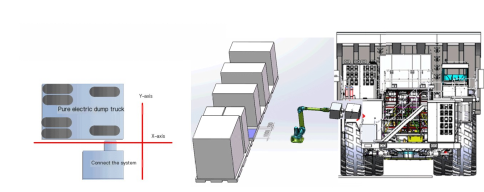
composition du système
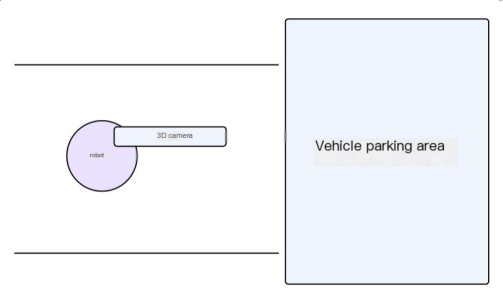
Système de positionnement visuel: utiliser des caméras de haute précision et des algorithmes visuels pour obtenir un positionnement précis du port de charge sur les camions à benne. Le système visuel doit avoir la capacité de résister à la poussière et à directement la lumière du soleil, garantissant un fonctionnement stable dans divers environnements intérieurs.
Les robots et les mécanismes de poussée des armes à feu: les robots industriels avec une portée de bras de 3 m ou plus sont sélectionnés, équipés de mécanismes de poussée de pistolets spécialement conçus. Le mécanisme de poussée du pistolet devrait avoir une poussée et une précision suffisantes pour garantir que le pistolet de charge peut être inséré avec précision et rapidement dans le port de charge.
Système de charge: équipé d'un équipement de charge de haute puissance de 3 mégawatts, garantissant que le camion-benne peut être complètement chargé dans un court laps de temps et l'amélioration de l'efficacité de la production.
Système de contrôle: via un système de contrôle intégré, un contrôle précis du positionnement visuel, du mouvement du robot et du processus de charge peut être obtenu. Le système de contrôle doit avoir des caractéristiques élevées d'automatisation et d'intelligence et être en mesure d'obtenir une charge automatique sans pilote.
Flux de travail
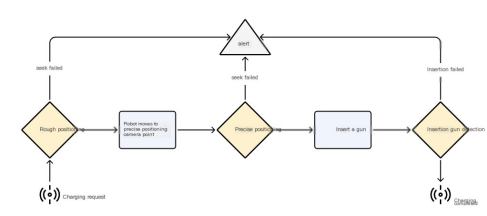
Positionnement du camion auto-décharge: Identifiez et localisez la position du port de charge du camion à benne via un système de positionnement visuel.
Mouvement du robot: Le système de contrôle guide le robot pour se déplacer près du port de charge du camion à benne basculant en fonction des résultats du positionnement visuel.
Poussant l'insertion des armes à feu: le robot est équipé d'un mécanisme de pistolet poussant, qui insère avec précision et rapidement le pistolet de charge dans le port de charge du camion-benne.
Processus de charge: le système de charge commence à charger le camion à benne avant jusqu'à ce qu'il atteigne le niveau de puissance ou le temps prédéfini.
Évacuation du robot: Une fois la charge terminée, le robot évacuera le port de charge et attendra l'arrivée du prochain camion à benne basculante.
technologie clé
Technologie de positionnement visuel: En utilisant des algorithmes tels que l'apprentissage en profondeur, la précision et la stabilité des systèmes de positionnement visuel peuvent être améliorées.
Technologie de contrôle des robots: optimiser la trajectoire et la vitesse du mouvement du robot pour améliorer l'efficacité de charge.
Conception du mécanisme de poussée du pistolet: assurez-vous que le mécanisme de poussée du pistolet a une poussée et une précision suffisantes, tout en considérant sa compacité structurelle et sa fiabilité.
Réponse au risque
Protection de l'environnement intérieur: assurer un environnement intérieur propre et sec, réduire l'impact de la poussière et la lumière directe du soleil sur le système de positionnement visuel.
Maintenance matérielle: entretienz régulièrement et entretienz régulièrement le matériel tel que les robots et les systèmes de positionnement visuel pour assurer leur fonctionnement normal.
Évaluation professionnelle: invitez les professionnels à évaluer et à optimiser le mécanisme de poussée des armes à feu, le système de charge, etc., pour assurer la sécurité et la faisabilité de la solution.
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine
