











QR Code

À propos de nous
Des produits
Contactez-nous

Téléphone

E-mail

Adresse
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine

Avec le développement rapide de la technologie de fabrication intelligente, l'application de lignes de production automatisées dans le domaine de la production d'acier magnétique devient de plus en plus répandue. Cependant, les méthodes traditionnelles de chargement manuel et de déchargement ont de nombreux problèmes, tels que une faible efficacité, une qualité instable, des risques de sécurité, etc., qui ne sont plus en mesure de répondre aux besoins de la production moderne. Fuwei Intelligence a proposé une solution de robot composite pour le chargement et le déchargement de l'acier magnétique, visant à améliorer l'efficacité de la production, à réduire les coûts de main-d'œuvre et à assurer la sécurité opérationnelle par des moyens intelligents.

Points de douleur de l'industrie
Faible efficacité de production: s'appuyant sur le fonctionnement manuel, il est difficile d'améliorer l'efficacité.
Qualité instable: la précision et la cohérence des opérations manuelles sont difficiles à garantir.
Maux de sécurité: des accidents tels que le pincement des mains et l'impact sont susceptibles de se produire pendant le fonctionnement.
Mauvais environnement de travail: constitue une menace potentielle pour la santé des opérateurs.
Aperçu des besoins et des solutions des clients
Demande des clients: Nous espérons obtenir un chargement automatique et un déchargement d'acier magnétique par des moyens intelligents, afin d'améliorer l'efficacité de la production et la stabilité de la qualité. Les exigences spécifiques incluent la réalisation du chargement et du déchargement de deux types de produits, avec un temps de cycle d'environ 80 secondes pour terminer le chargement et le déchargement de deux piles de produits, et ayant des exigences de haute précision.
Présentation de la solution:
Remplacement des moteurs et des contrôleurs de servo: amélioration des performances et de la stabilité du robot.
Équipé de navigation radar, de bandes légères et de haut-parleurs: améliorer la navigation, la visibilité et l'interactivité autonomes du robot.
Concevoir une pince personnalisée: intégrer la caméra et le capteur pour obtenir une reconnaissance précise et la saisie de l'acier magnétique.
Optimisez la configuration de la disposition et de l'équipement des zones de chargement et de déchargement pour garantir que les robots peuvent terminer avec précision et efficacement leur travail.
Implémentation et optimisation du plan
Transformation du robot composite:
Sélectionnez des moteurs et des contrôleurs de servo haute performance pour assurer la précision et la stabilité du mouvement.
Équipé de la navigation radar pour atteindre le positionnement autonome et la planification des chemins.
Installez les bandes de lumière LED et les haut-parleurs d'alarme pour améliorer la visibilité et l'interactivité.
Concevoir des pinces personnalisées qui intègrent des caméras et des capteurs pour obtenir une identification précise et une saisie de l'acier magnétique.
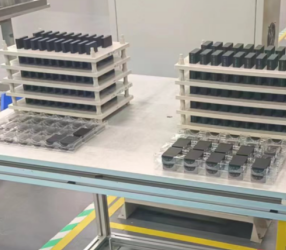
Optimisation de la zone de chargement:
Concevoir des fentes de guide de positionnement pour guider l'acier magnétique dans des positions désignées.
Configurez les marqueurs de positionnement de bureau pour faciliter la reconnaissance du robot et le positionnement des points de saisie.
Rénovation de la zone de déchargement des matériaux:
Réglez la marque de positionnement de l'appareil pour vous assurer que le robot place avec précision l'aimant.
Installez les portes du panneau de commande électrique et les créneaux de glissement de commande électrique pour protéger les opérateurs des blessures et obtenir l'éjection automatisée de l'équipement.
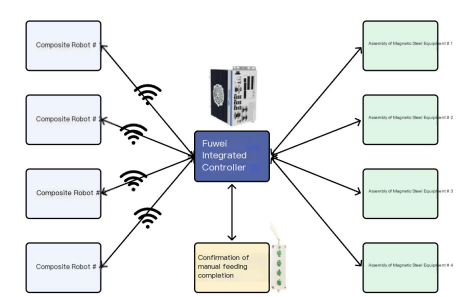
Logique d'exécution et optimisation du processus
La logique d'exécution de l'ensemble du plan est basée sur la conception du processus de la ligne de production automatisée, garantissant la continuité et l'efficacité du flux de travail. L'ensemble du processus est déclenché par une demande de chargement et le robot effectue des opérations de récupération de matériel en fonction de l'état de la zone de chargement. Au cours du processus de sélection et de placement des matériaux, une reconnaissance précise et un contrôle de la force sont obtenus par des caméras et des capteurs intégrés dans la pince. Une fois que l'aimant est placé avec succès sur l'équipement, le robot confirmera l'achèvement du chargement et passera au cycle suivant.
En utilisant le robot composite intelligent Fuwei pour la charge et le déchargement magnétiques en acier, il peut résoudre efficacement les problèmes de chargement manuel traditionnel et
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine
