











QR Code

À propos de nous
Des produits
Contactez-nous

Téléphone

E-mail

Adresse
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine

SLAM , également connu sous le nom de positionnement synchrone et de construction de cartes, il s'agit d'une technologie de base cruciale dans le domaine de la technologie des robots mobiles. Il permet aux robots d'estimer simultanément leur propre position et de construire des cartes environnementales dans des environnements inconnus, qui est la clé pour réaliser une navigation et une exploration autonomes.
1 、 Principe technologique SLAM
L'idée principale de la technologie SLAM est d'atteindre l'auto-localisation et la construction de cartographie des robots dans des environnements inconnus à travers la fusion et le traitement des données des capteurs (comme le lidar, les caméras, etc.). Plus précisément, la technologie SLAM se compose de deux parties principales: l'odométrie frontale et l'optimisation back-end.
1. Odomètre avant: cette section est principalement responsable de l'estimation de la trajectoire de mouvement du robot via les données du capteur. Il calcule le déplacement relatif et la transformation d'attitude du robot en analysant les changements dans les données des capteurs à des moments consécutifs. Les méthodes courantes incluent la correspondance des caractéristiques, le débit optique, etc. La sortie de l'odomètre frontal est une estimation préliminaire de la pose du robot, mais en raison du bruit du capteur et des erreurs accumulées, ces résultats d'estimation ne sont souvent pas suffisamment précis.
2. Optimisation du backend: Afin d'améliorer la précision du positionnement et la cohérence des cartes, la technologie SLAM introduit un processus d'optimisation backend. Cette section utilise des données historiques, une détection de boucle et d'autres méthodes pour calibrer et optimiser les résultats de l'odomètre frontal. Les méthodes d'optimisation couramment utilisées comprennent des méthodes basées sur le filtre (telles que le filtre Kalman étendu, le filtre à particules, etc.) et les méthodes d'optimisation basées sur les graphiques. Ces méthodes peuvent réduire efficacement les erreurs cumulatives et améliorer la précision du positionnement du robot et de la construction de cartes.
3 、 L'application de la technologie SLAM dans les robots mobiles
SLAM Technology, en tant que l'une des technologies de base des robots mobiles, a de larges perspectives d'application dans plusieurs domaines. Voici plusieurs cas d'application typiques:
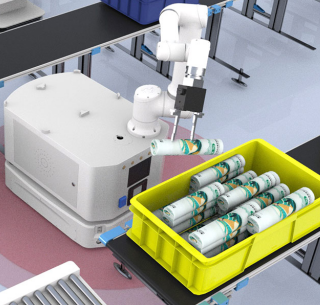
1. Navigation autonome: Dans les champs de l'entreposage et de la logistique, de l'usinage, etc., les robots mobiles doivent atteindre des fonctions de navigation autonomes. En utilisant la technologie SLAM, les robots peuvent percevoir leur environnement en temps réel et construire des cartes, planifiant ainsi le chemin optimal et se dirigeant de manière autonome vers l'emplacement cible. Cela améliore considérablement l'efficacité du travail et l'autonomie des robots.
2. Exploration et modélisation environnementales: dans des environnements inconnus, les robots mobiles peuvent utiliser la technologie SLAM pour l'exploration et la modélisation environnementales. En collectant en continu les données des capteurs et en mettant à jour les informations de carte.
3. Interaction de la machine humaine et services intelligents: avec le développement continu de la technologie de l'intelligence artificielle, les robots mobiles sont de plus en plus appliqués dans les domaines de l'interaction de la machine humaine et des services intelligents. En utilisant la technologie SLAM pour obtenir un positionnement précis et une reconnaissance de scène, les robots peuvent offrir aux utilisateurs une expérience de service plus personnalisée et intelligente. Par exemple, guider les clients dans les centres commerciaux et les personnes âgées qui accompagnent à la maison ont de larges perspectives d'application.
SLAM Technology, en tant que l'une des technologies de base des robots mobiles, fournit un fort soutien à la réalisation de la navigation autonome et de l'exploration environnementale. Dans le même temps, face à des scénarios d'applications complexes et en constante évolution et à la mise à niveau constante des demandes des utilisateurs, nous devons également continuer à prêter attention et rechercher de nouvelles technologies et méthodes de slam pour promouvoir le développement et l'application de la technologie de robot mobile.
N ° 22, Hongyuan Road, Guangzhou, province du Guangdong, Chine
